27Apr2025
-
27Apr2025
Beyond the Lab: A General Approach to Hand-Eye Calibration through Optimized Atomic Transformations
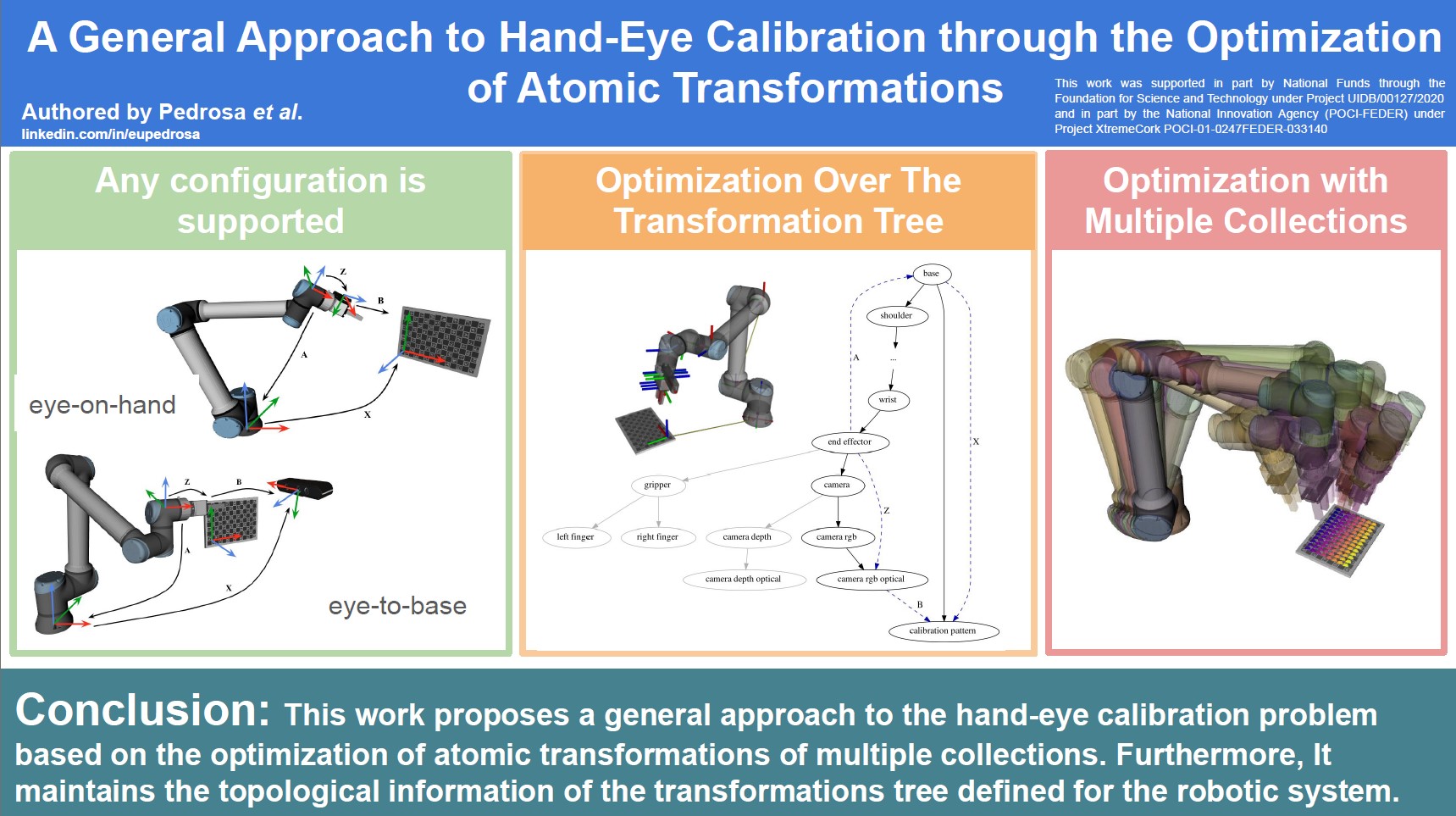
Hand–eye calibration is critical for robotics, enabling precise coordination between cameras and robotic systems. Our work introduces a general approach that stands out for its versatility and accuracy:
Key Highlights
• Handles Multiple Setups: Simultaneously supports eye-on-hand and eye-to-base configurations, as well as multiple cameras.
• Nonlinear Optimization: Uses a nonlinear least squares method guided by reprojection error to achieve optimal calibration.
• State-of-the-Art Accuracy: Delivers superior results with minimal initial configuration, outperforming existing algorithms.
This solution pushes the boundaries of calibration techniques, offering a robust, accurate, and adaptable framework for robotics applications in diverse environments.
#Robotics #ComputerVision #Calibration #Optimization #InnovationInEngineering
Authored by: Eurico Pedrosa
Supported by: This work was supported in part by National Funds through the Foundation for Science and Technology under Project UIDB/00127/2020 and in part by the National Innovation Agency (POCI-FEDER) under Project XtremeCork POCI-01-0247FEDER-033140.
Share in: